从零实现 LLM Inference:072. CPU/GPU Overlap Scheduler(把 roseinfer 的 decode loop 做成 pipeline)
这篇只做一件事:把 roseinfer 的 scheduler loop 做成 CPU/GPU overlap 的 pipeline。
你可以把它理解成一句话:每一步先把 GPU 的下一步 forward 发出去,再回头处理上一步的输出,让 CPU 的“杂活”(同步、tolist、状态更新、detokenize/queue)尽可能不阻塞 GPU。
核心结论先放前面:在同一份 TraceA 的 online 压测下,开启 overlap 后,TPOT/ITL/E2E 的 tail 在重负载(scale=0.4)会明显下降;offline 吞吐也会有一档可测的提升(默认开,开关可回归)。
业界调研:SGLang / vLLM / TensorRT-LLM 的 overlap 都在 overlap 什么?
1) SGLang:FutureMap + “下一步占位 token” + one-step delayed output
SGLang 的 Scheduler.event_loop_overlap()(源码:python/sglang/srt/managers/scheduler.py)基本把思路写在代码里了:
- 给当前 batch 分配一段“未来 token”槽位(
FutureMap.alloc_future_indices) - 把 未来 token 的 index 写进 batch 的
output_ids(用负数表达 future index) - forward 完拿到
next_token_ids后,把它写进 GPU 的FutureMapbuffer(FutureMap.store_to_map) - 下一步 forward 的输入里如果出现负数 token id,就用
FutureMap在 GPU 上 resolve 成真实 token(_resolve_future_token_ids) - 结果处理(
process_batch_result_*)被 延后一个 iteration:当前 iteration launch forward,同时处理上一个 batch 的输出
它的“狠”在于:下一步 forward 不需要等 CPU 把 token id 搬回来,因为 token 先留在 GPU 的 FutureMap 里,下一步直接在 GPU resolve。
2) vLLM:async scheduling + 专用 copy stream + pinned CPU buffer
vLLM 新版里更偏“工程化”:scheduler/runner 支持 async scheduling,并且显式搞了一条 async_output_copy_stream 来做 GPU->CPU 输出 copy(源码:vllm/v1/worker/gpu_model_runner.py)。
关键点是两个:
- 避免
tolist()触发全局 stream sync(critical path 上非常痛) - copy 放到独立 stream,用 event 做协调,让 copy 和下一步 compute 尽量并行(硬件层面能吃到 copy engine 的 overlap)
3) TensorRT-LLM:overlap scheduler 是 executor loop 的默认能力
TensorRT-LLM(PyTorch executor 这条线)也有 disable_overlap_scheduler(默认不 disable),并且在 executor 的 loop 里把 “prepare/schedule/forward/sample/update” 做成 overlap 版本(源码:tensorrt_llm/_torch/pyexecutor/py_executor.py 里的 _executor_loop_overlap)。
它的启发是:overlap 不只是优化点,而是 scheduler 的运行模式(on by default,off 只是为了 debug/回归)。
roseinfer 现状:为什么我们需要 overlap?
在没有 overlap 时,典型的 decode loop(简化)是串行的:
- GPU:model forward(decode step)
- CPU:把 logits/next_token 搬回 CPU(常见就是
.tolist()/同步) - CPU:更新 session、判断 stop、detokenize/flush、组织输出
- 回到 1
于是单步 token latency(ITL)在 steady-state 下更接近:
\[\mathrm{ITL} \approx T_{\text{gpu\_forward}} + T_{\text{cpu\_post}} + T_{\text{sync}}\]而 overlap 的目标是把它变成 pipeline:
\[\mathrm{ITL}_{\text{overlap}} \approx \max\left(T_{\text{gpu\_forward}},\, T_{\text{cpu\_post}} \right) + \varepsilon\]其中 $\varepsilon$ 是少量的 event/copy bookkeeping。
设计:在 roseinfer 里选哪条“极致性能”的 overlap 路线?
我最终选的是:SGLang 的 FutureMap + placeholder token 思路,并结合 vLLM 的 event/copy 习惯,把“同步点”推迟一拍:
- GPU 侧:用一段
future_token_ids_map存放“下一步 token id” - Session 侧:把“下一步要喂给 decode 的 token”先写成负数占位(placeholder)
- Engine 侧:在
decode_step_sessions()内把负数 token 用future_token_ids_mapresolve(CUDA graph 路径也必须支持) - Scheduler 侧:输出处理延迟一个 step:iteration $t$ 先 launch batch $t$ 的 forward,再处理 batch $t-1$ 的输出
用一张时序图表达就是:
sequenceDiagram
participant CPU as Scheduler(CPU)
participant GPU as Engine(GPU)
Note over CPU,GPU: steady-state (one-step delayed output)
CPU->>GPU: launch forward(t) + sample next_ids(t)
CPU->>GPU: write next_ids(t) into FutureMap (GPU)
CPU->>GPU: async D2H copy next_ids(t) + record event
CPU->>CPU: process output(t-1) (event sync + detok + queues)
为什么这条路线“狠”:
- 下一步 forward 的输入 token 不靠 CPU 回填,GPU 直接 resolve(避免强制 sync)
- overlap 不需要额外线程:scheduler 一个 loop 就能做(对我们当前结构侵入最小)
- 逻辑上可控:默认开,随时
--no-overlap-schedule回到传统同步路径做 debug
实现:关键改动与踩坑(真实)
1) Engine:decode_step_sessions() 支持 future token resolve(CUDA graph 也要支持)
落地在 rosellm/roseinfer/engine.py:
InferenceEngine.decode_step_sessions(..., future_token_ids_map=...)- 如果
input_ids中出现负数:用torch.where(ids < 0, future_map[-ids], ids)resolve - eager path 和 CUDA graph replay path 都要做(否则 graph 里会吃到负 token 直接炸)
- 如果
2) Scheduler:OnlineScheduler/ChunkedOnlineScheduler 引入 overlap mode(默认开)
rosellm/roseinfer/engine.py:
OnlineScheduler(overlap_schedule=True)ChunkedOnlineScheduler(overlap_schedule=True)
每个 decode iteration 做两件事:
- 先发 GPU:跑当前 batch forward + sample,并把 next token 写进 FutureMap,同时给每个 session append 一个 placeholder(负 token id)。
- 再处理上一步:同步上一步的 copy event,把 placeholder 替换成真实 token,更新
committed_step_count,产出本次step_tokens。
3) 坑:placeholder 会污染“长度/结束条件/解码”
placeholder 是负数 token id,如果你直接:
- 用
len(generated_ids)当生成长度:会提前触发max_new_tokens - 用
tokenizer.decode(all_ids):会把负数当 token id 直接炸
解决:
InferenceSession新增committed_step_count(只统计已 resolve 的 token)all_token_ids()/get_generated_ids()过滤掉负数 token
4) 坑:最隐蔽的 bug —— “把 placeholder 当成当前步输入”
如果你在同一个 iteration 内:
- 先 append placeholder 到
sess.generated_ids - 再去读
sess.generated_ids[-1]作为当前步 input
那你会把 placeholder 喂给本步 forward,结果完全错。
修法是:提前捕获当前步的 input_token_ids/position_ids,并显式传给 decode_step_sessions()(避免读被修改后的 session)。
5) 坑:Cancel(断连)不能乱 pop list
多进程 serving 里,client 断连会 cancel request。overlap 模式下,如果一个 request 还有 inflight placeholder:
- 你不能直接
pop()掉 placeholder(会导致 index shift,后续 resolve 写错位置)
我这里选了“最稳”的策略:
- cancel 时只把 session 标成 finished,并把 rid 放进
_overlap_canceled - resolve 时 只做替换,不做 pop;等 inflight 归零后再统一释放 KV 并从 scheduler 移除
开关体系:默认开启,可一键 A/B
Server
rosellm/roseinfer/server.py 新增:
--overlap-schedule(默认)--no-overlap-schedule
并且在 engine-process 模式下也会把该参数透传到子进程 scheduler。
Benchmark
benchmarks/serving/online_compare.py / benchmarks/serving/offline_compare.py 新增:
--roseinfer-compare-overlap-schedule:自动跑roseinfer两次(on/off)
Benchmark:online/offline(A/B:overlap on/off + 对比 vLLM/SGLang)
Online(一键跑)
python benchmarks/serving/online_compare.py \
--model gpt2 --gpu 0 \
--backends roseinfer,vllm,sglang \
--roseinfer-compare-overlap-schedule \
--n 200 --scales 0.4,0.8,1.6 \
--max-output-len 64 \
--ignore-eos \
--timeout-ready-s 600
Offline(一键跑)
python benchmarks/serving/offline_compare.py \
--model gpt2 --gpu 0 \
--backends roseinfer,vllm,sglang \
--roseinfer-compare-overlap-schedule \
--num-prompts 128 --input-len 256 --output-len 64 \
--ignore-eos
结果(HF GPT-2 / GPU0)
运行环境 / 版本 / 耗时(这次跑出来的真实数据)
- versions:
git_rev=17f61b1, rosellm=0.1.0, vllm=0.7.2, sglang=0.4.6, torch=2.6.0, transformers=4.51.3, python=3.11.11 - online:
dtype=fp16,ignore_eos=true,n=200,scales=0.4,0.8,1.6, wall=946.77s - offline:
dtype=fp16,ignore_eos=true,num_prompts=128,input_len=256,output_len=64, wall=52.47s
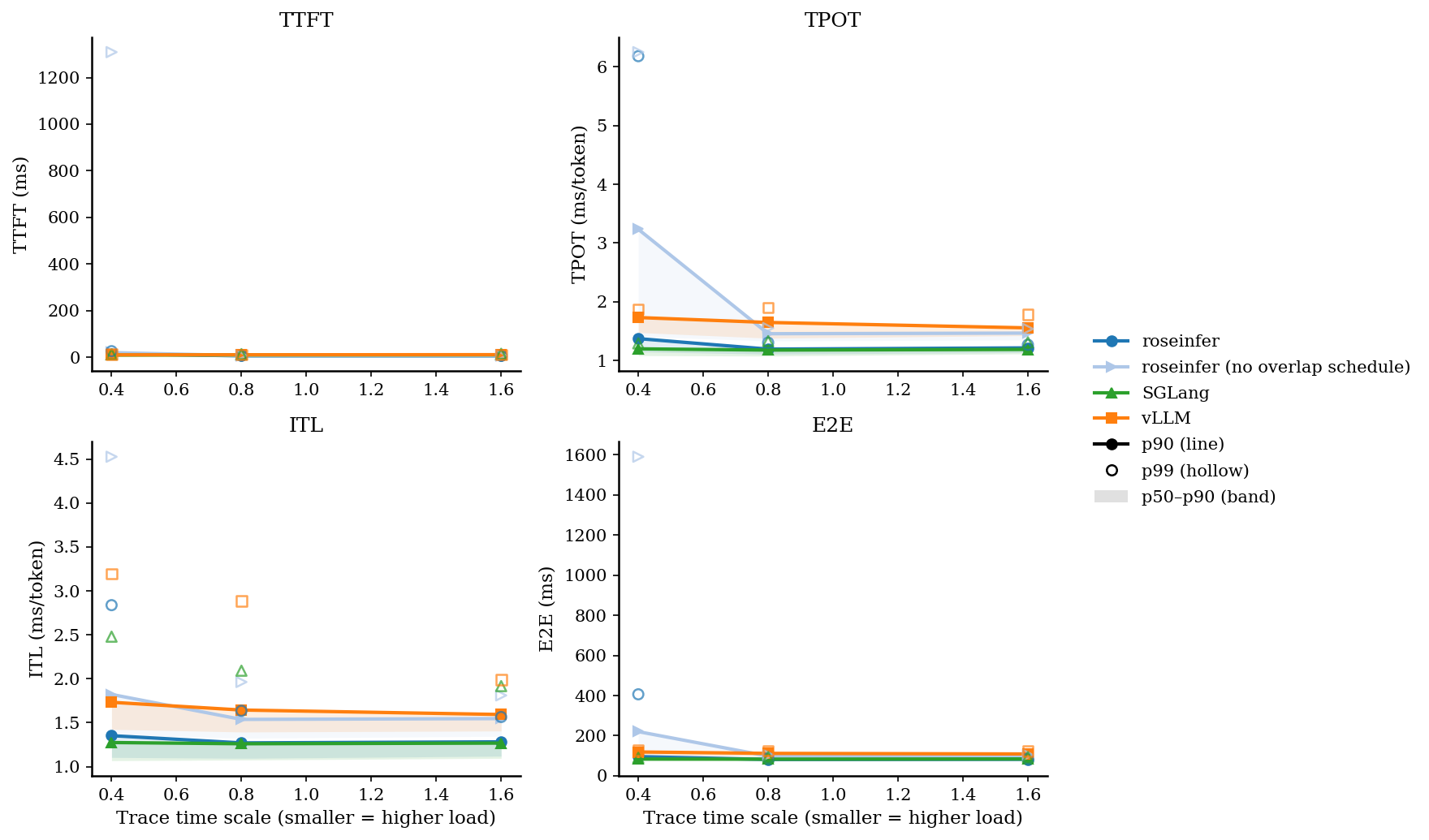
Online:p50/p90/p99(ms)
| scale | backend | TTFT p50/p90/p99 (ms) | TPOT p50/p90/p99 (ms) | ITL p50/p90/p99 (ms) | E2E p50/p90/p99 (ms) |
|---|---|---|---|---|---|
| 0.40 | roseinfer | 9.61/15.43/26.39 | 1.15/1.37/6.18 | 1.10/1.35/2.84 | 82.20/95.83/406.29 |
| 0.40 | roseinfer (no overlap schedule) | 11.84/20.29/1308.87 | 1.41/3.24/6.25 | 1.36/1.82/4.53 | 99.09/220.22/1590.29 |
| 0.40 | SGLang | 8.07/9.67/13.03 | 1.08/1.20/1.29 | 1.07/1.27/2.48 | 76.60/83.50/90.11 |
| 0.40 | vLLM | 9.19/10.53/12.68 | 1.48/1.73/1.88 | 1.42/1.73/3.20 | 102.08/118.87/127.08 |
| 0.80 | roseinfer | 5.32/6.26/7.37 | 1.11/1.19/1.30 | 1.09/1.27/1.63 | 75.50/81.57/88.33 |
| 0.80 | roseinfer (no overlap schedule) | 6.38/7.33/7.89 | 1.33/1.46/1.55 | 1.32/1.54/1.96 | 90.91/98.62/103.93 |
| 0.80 | SGLang | 8.76/10.32/13.70 | 1.08/1.18/1.33 | 1.07/1.26/2.09 | 76.73/83.11/93.23 |
| 0.80 | vLLM | 9.36/10.80/11.48 | 1.38/1.65/1.90 | 1.39/1.64/2.88 | 97.22/111.98/124.90 |
| 1.60 | roseinfer | 5.59/6.26/6.48 | 1.14/1.22/1.27 | 1.12/1.28/1.56 | 77.08/82.37/86.41 |
| 1.60 | roseinfer (no overlap schedule) | 6.58/7.38/7.94 | 1.35/1.47/1.54 | 1.34/1.55/1.81 | 92.19/99.43/104.36 |
| 1.60 | SGLang | 9.25/10.71/15.14 | 1.11/1.19/1.31 | 1.09/1.27/1.92 | 78.95/84.12/93.02 |
| 1.60 | vLLM | 10.04/11.36/11.82 | 1.42/1.56/1.79 | 1.40/1.59/1.99 | 99.08/109.00/123.77 |
Online:2x2 指标总览图(p90 曲线 + p50~p90 band,空心点为 p99)
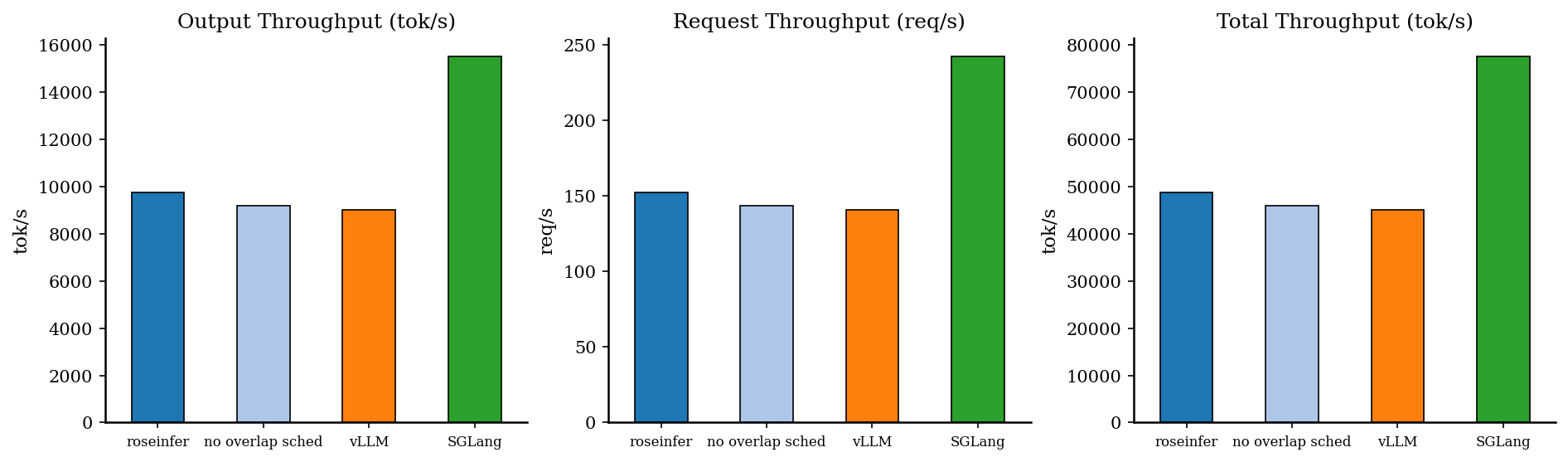
Offline:吞吐对比
| backend | req/s | output tok/s | total tok/s | total latency (s) |
|---|---|---|---|---|
| roseinfer | 152.27 | 9745.11 | 48725.57 | 0.841 |
| roseinfer (no overlap schedule) | 143.75 | 9199.73 | 45998.66 | 0.890 |
| SGLang | 242.78 | 15538.24 | 77691.19 | 0.527 |
| vLLM | 140.99 | 9023.64 | 45118.21 | 0.908 |
小结
- 这版 overlap 的本质是:把同步点推迟一拍,让 CPU 的处理尽量和 GPU forward 并行。
- 从数据看,在重负载(scale=0.4)下,
roseinfer的TPOT/E2Etail 下降非常明显;offline 吞吐也有稳定提升。 - 下一步如果要继续榨极限,可以进一步学 vLLM:把 token-id 的 D2H copy 放进专用 copy stream + pinned buffer ring(进一步把 copy 从 compute critical path 拿走)。